- 概述
- 无人机图像缺陷分析
- 变电站安全监测分析
- 智能视频分析
近年来,深度学习在各个领域取得较大突破,比如计算机视觉领域的物体识别、场景分类,行为分析等,并且其技术推广和应用的速度超过人们预期。行业应用对具有深度学习的图像识别技术有着急切的需要,具体应用上可以对散落在不同场景下碎片化、非结构化的文字、图片、声音、视频等数据应用深度学习方法,对目标对象的特征进行刻画。例如可以了解消费者其当前需求甚至挖掘潜在需求,推荐相应的产品或服务,实现精准营销;或者监控大型复杂设备的实时状态并对未来的状态进行预测,实施预测性维护保养等。
电力行业一直以来都需要人工维护大量电气通信设备,通过深度学习的图像识别技术可以大幅度提高运维效率、降低人力成本。基于深度学习的图像检测技术,是在目前视频监控系统、机器人巡检系统及无人机巡检快速发展的基础上,实现针对电网变电站智能化产品化应用。
无人机图像缺陷分析
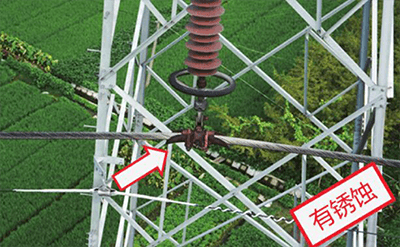
基于无人机平台的高压电塔锈蚀检测技术。无人机巡检,由于其具有高效、准确和安全等特点,近几年已成为输电线路巡检的重要方式。利用平台上装载的摄像头获取了大量航拍图像,其检测内容包括绝缘子有无缺失和锈蚀,以及塔架上有无鸟巢的业务需求。首先为目标检测,即在图像中定位出绝缘子的目标,其中要克服背景复杂,图像分辨率低等不利因素;第二,就是对其状态进行分类,如表面锈蚀、裂缝、破损等状态。
如何提取出能够充分辨别出故障的特征是关键技术所在。一是基于先验形状的定位方法,从复杂背景航拍图像中定位出绝缘子串是对其表面缺陷检测的必要前提,在对大量航拍绝缘子图像进行实验分析的基础上,挖掘了绝缘子串的先验形状统计特性,提出了基于方向角检测与二值形状特征的定位方法。二是基于深度特征的状态检测方法,绝缘子定位方法能够精确定位绝缘子串,且误定位率低,耗时短。将定位后的绝缘子串分割为多个伞盘图像,因此可以判断每个伞盘的故障类型。
在电网变电站中为了安全目的生产监控也有诸多应用需求,包括人(维修施工人员、安检人员、非法闯入人员等)、物(安全施工栅栏、红色警示布帘、施工警示牌、门窗等)和环境(温度、湿度等)。无人值守变电站需要运用有智能化的判别能力,利用人工智能技术将值班人员从长期紧盯屏幕的紧张状态中解脱出来。
变电站安全监测分析
基于机器人平台的红色安全帽检测技术。用以在机器人巡检过程中,检测施工人员是否佩戴安全帽进行作业施工。其基本技术实现为,首先检测监控区域内是否有运动目标进入视频范围;其次根据运动目标所在位置,通过目标区域顶端的部分区域确定安全帽的准确位置;最后确定识别安全帽的轮廓和颜色判断是否佩戴安全帽。通过这一技术能够快速发现生产作业中存在的安全隐患,及时发现问题从而降低风险。


基于机器人平台的安全栅栏检测技术。用以在机器人巡检过程中,检测施工安全围栏是否倾倒或摆放错误。安全围栏具有较为明显的外形特征和颜色区分,作用规范要求施工作业时必须按照要求将工作区域围挡,从而警示该设备正在检修作业中。通过对安全栅栏具有典型的纹理特征,通过基于灰度共生矩阵的纹理分析法提取特征识别。主要过程是,以像素对的方向和距离为变化量建立共生矩阵,再从此矩阵中提取可以表征图像内容的统计量作为纹理特征。这样的过程满足检索准确度的情况下,降低了计算量。
智能视频分析
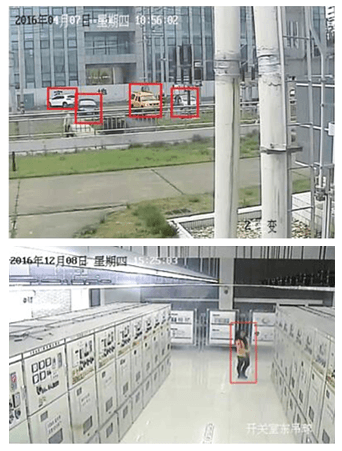
基于固定摄像机的目标跟踪检测技术。用以检测变电站内人员闯入禁区的行为。鉴于变电站背景环境复杂,有的在居民小区中,有的在野外农田中,由于无人值守,存在较大的安全风险。而一般固定相机视野较广,视频中运动物体相对较小,运动的人体经常被遮挡或半遮挡,背景由各种各样的电线杆和母线等物体组成等特点。采用了基于OpenCV的混合高斯模型进行运动目标检测。
在实际的监控环境中,有些运动目标并不是运动的人体,而是被风吹动的杂草、飞过的小鸟等。这些运动目标也有可能作为运动前景被提取出来,经过大量的实验分析,发现这些运动目标存在一个共性,即存在的时间很短。因此,在确定有效的运动目标时。该系统为每个目标建立了一个表示其生命周期的链表,链表的长度表示了该目标存在的时间长短只有链表长度达到某个值,即目标存在时间超过一定的数值,才认为该目标为有效运动物体,否则认为该运动目标为干扰物体。
赛特斯以人工智能技术为基础,采用先进的深度学习技术和计算机视觉技术,通过基于深度学习的图像识别方法,对监控对象进行智能识别,为巡检部门提供先进的技术和管理手段,全面提高巡检质量和管理水平。通过对巡检信息自动统计,异常信息自动提示、拍照存档,形成历史记录,便于快速对安全隐患做出响应,实现由被动防范到主动防范的转变。
在室外的视频监控中,必然会遇到阴影问题。通过的改进的单高斯背景模型估计算法和快速的阴影消除方法来消除阴影。本系统检测的目标为运动的人体,而人的姿态具有随意性,如站立、行走、下蹲等。因此,在检测到运动目标之后需要对其进行跟踪,从而确定目标在下一帧的位置和大小。
